|
Naitri Rajyaguru I'm a Ph.D. student in Computer Science at University of Maryland, advised by Prof. Yiannis Aloimonos in the Perception and Robotics Group. My research focuses on developing minimal cognitive architectures by leveraging fundamental principles of AI, computational imaging, and computer vision. I aim to enable small, resource-constrained robots to perform complex tasks efficiently. My current work addresses these core areas:
Previously, I worked at Zupt LLC on underwater pose estimation and in the Perception and Robotics Group on drone navigation and 3D vision. |

|
 |
 |
 |
|
 |
| Ph.D. CS UMD July 2024 - Current |
Computer Vision Research Engineer Zupt LLC July 2023 - Jan 2024 |
Research Intern Ford Summer 2022 |
M.Eng Robotics University of Maryland, College Park 2021-2023 |
Research Associate Swayyatt Robots Feb 2021 - July 2021 |
News
|
Publications
CodedVO: Coded Visual Odometry Naitri Rajyaguru*, Sachin Shah*, Chahat Deep Singh, Cornelia Fermüller, Christopher Metzler†, Yiannis Aloimonos† Accepted in RAL / Presented in ICRA40 CodedVO, a novel monocular visual odometry method that leverages optical constraints from coded apertures to resolve scale ambiguity of monocular depth estimation. |
Selected Projects
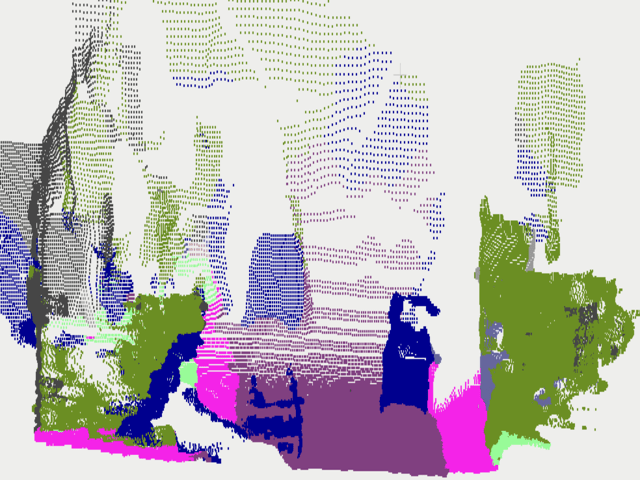
Point Painting: Point Cloud Object Segmentation Semantic segmentation for LIDAR & Camera using SegFormer. 
Super Pixel Generation using SLIC and Image Segmentation Image segmentation using superpixels generated with SLIC and k-means with high accuracy using VGG16. |
|
Website Template Credit Link. |